Stand-alone vs. Packaged Variable Speed Drive – Which Should I Choose (Part I)
When selecting a new variable speed drive (VSD), there are a number of decisions to be made based on expected use, performance, and operating life. One such decision involves the choice of a stand-alone VSD module versus a packaged drive. What’s the difference? Well, a drive module is generally considered a self-contained converter-inverter combination (in AC applications) or a self-contained converter (in DC applications), containing internally the appropriate controls and programming to derive an adjustable output from the incoming supply. A packaged drive places this stand-alone module within a suitable enclosure and adds line-side disconnecting means and overcurrent protection, enclosure door-mounted control devices, output power and control terminations, and properly sized means for maintaining specified operating temperature within the enclosure. There are other options which can be added as well. An example of a drive module is shown in Fig. 1, and a packaged drive example is shown in Fig. 2.
 Fig. 1 – Drive Module (ACS880 series) Courtesy of ABB Inc.
Fig. 1 – Drive Module (ACS880 series) Courtesy of ABB Inc.

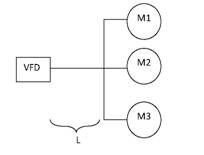 A: The most important consideration in the case of multiple motors connected to a single drive is the length of the leads between the VFD and the point of common connection of the
A: The most important consideration in the case of multiple motors connected to a single drive is the length of the leads between the VFD and the point of common connection of the